1,、采集系統(tǒng)整體規(guī)格
系統(tǒng)采用標(biāo)準(zhǔn)的6U VPX 架構(gòu),包括如下幾個(gè)部分:
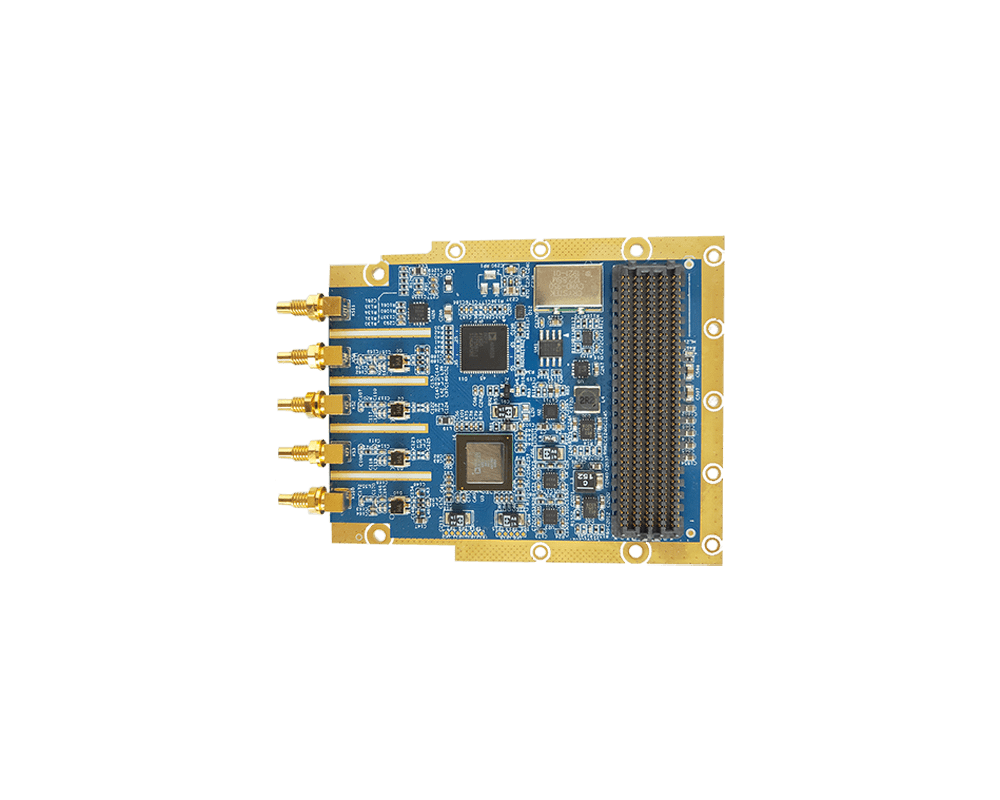
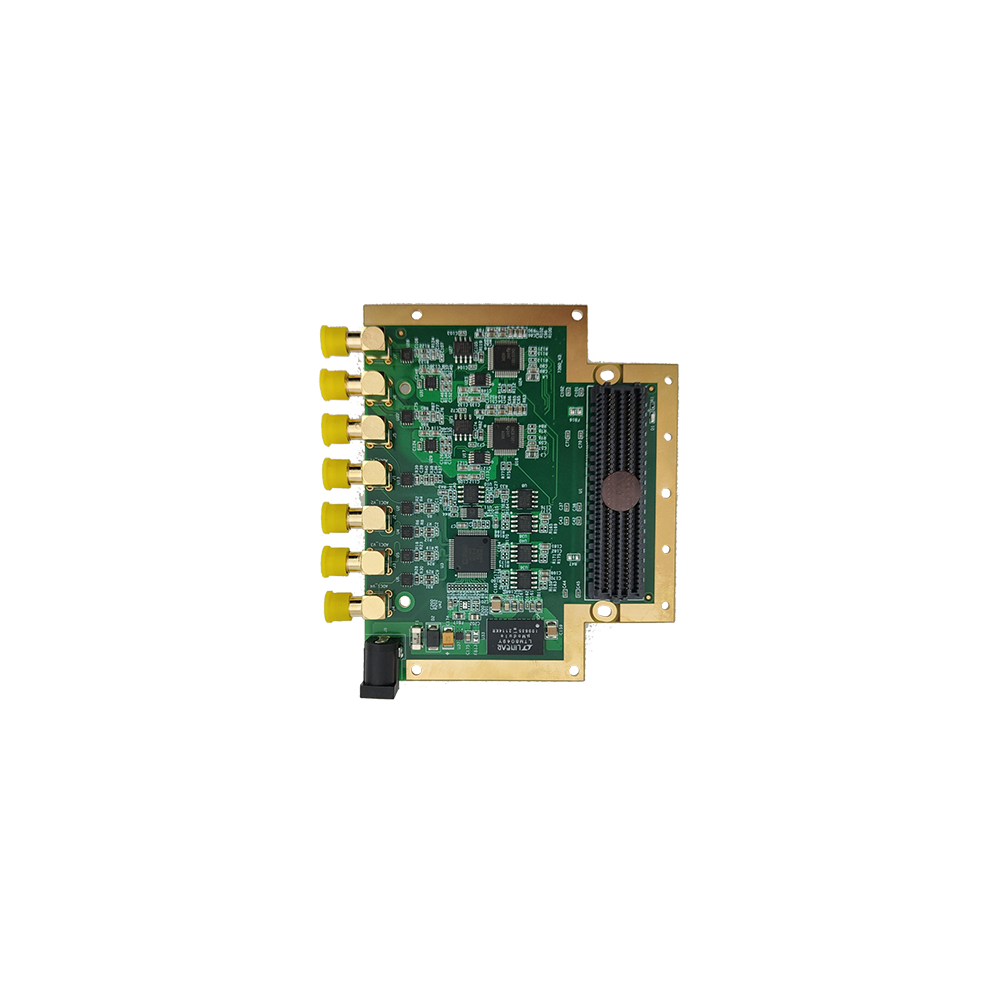
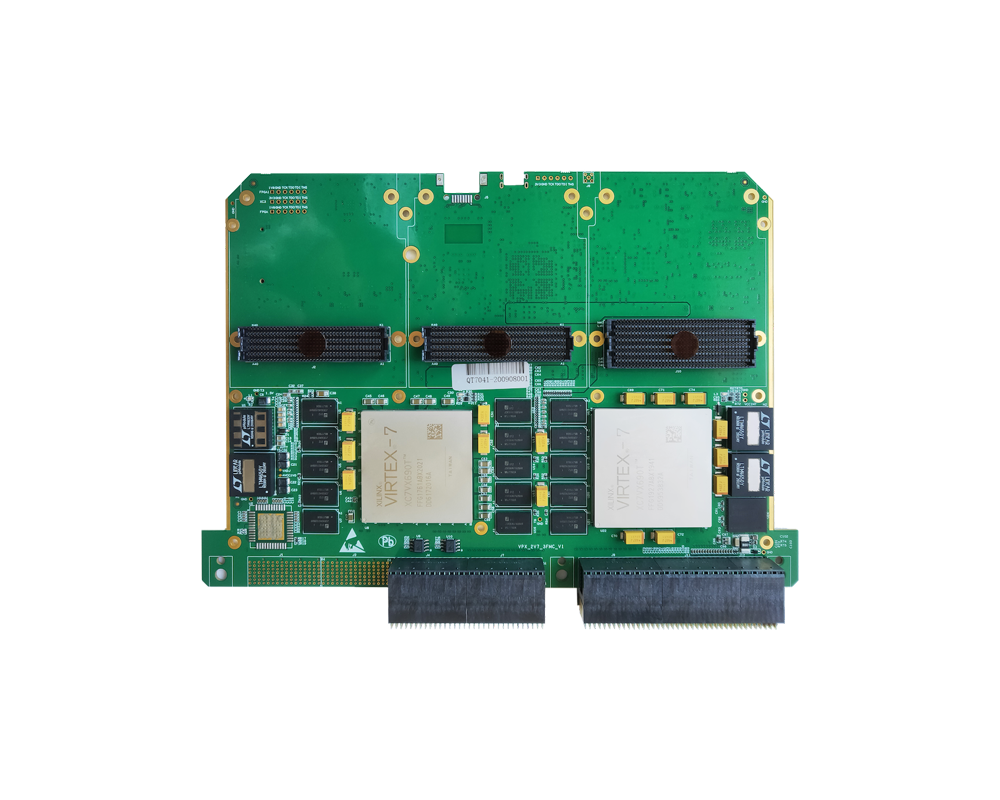
1.采集模塊,集成8通道 14bit 500MSPS采集,標(biāo)準(zhǔn)VPX 6U尺寸卡。
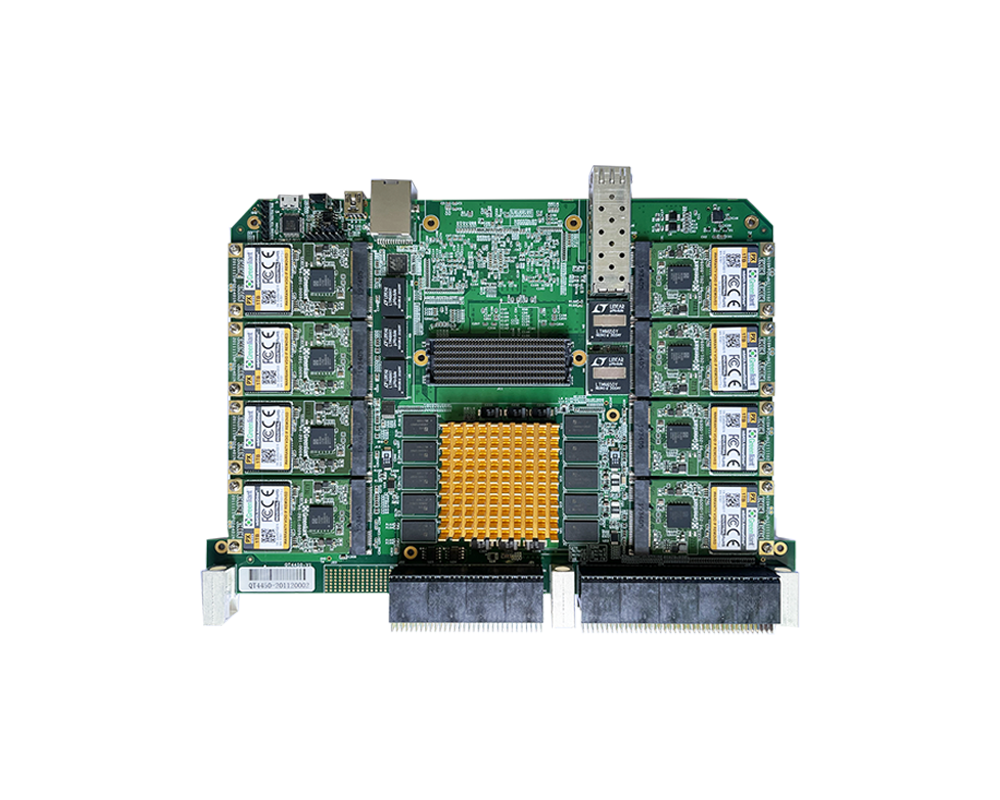
2.板載高速存儲(chǔ)器,,每通道支持512Msamples采樣點(diǎn)存儲(chǔ)。
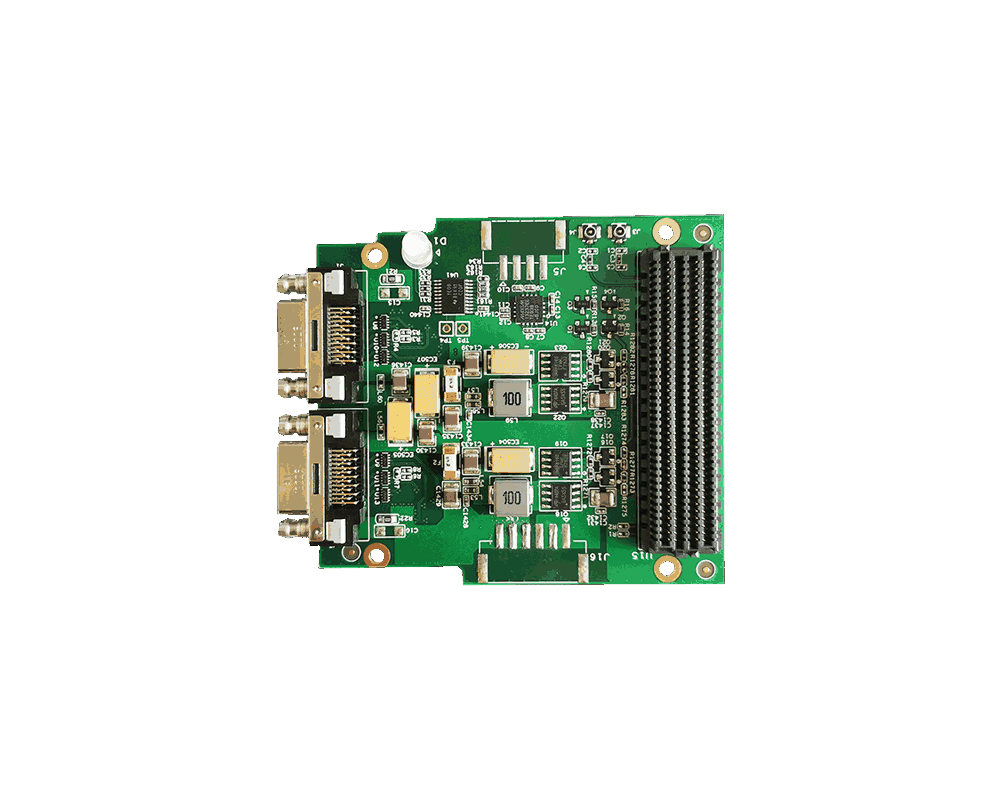
3.時(shí)鐘,觸發(fā)同步模塊,,同步各個(gè)機(jī)箱中各個(gè)模塊時(shí)鐘。
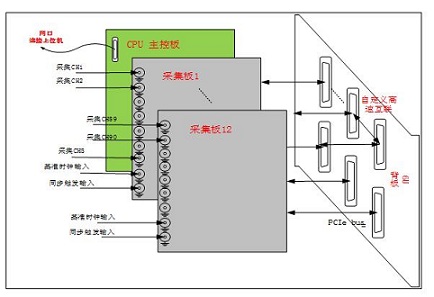
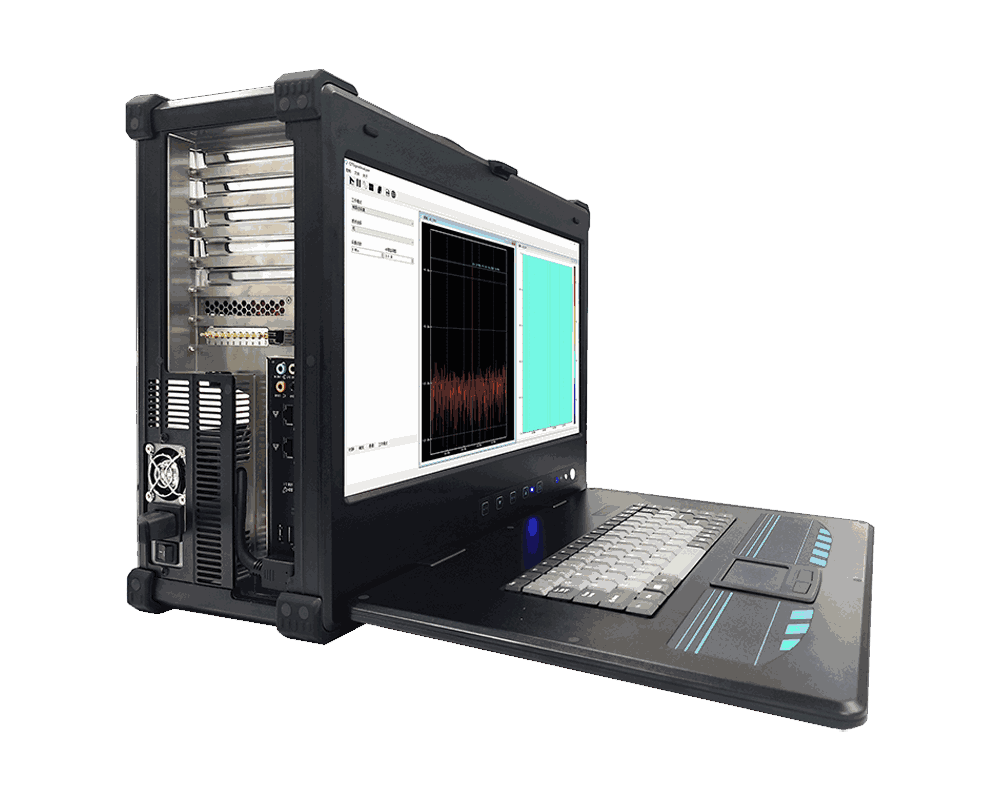
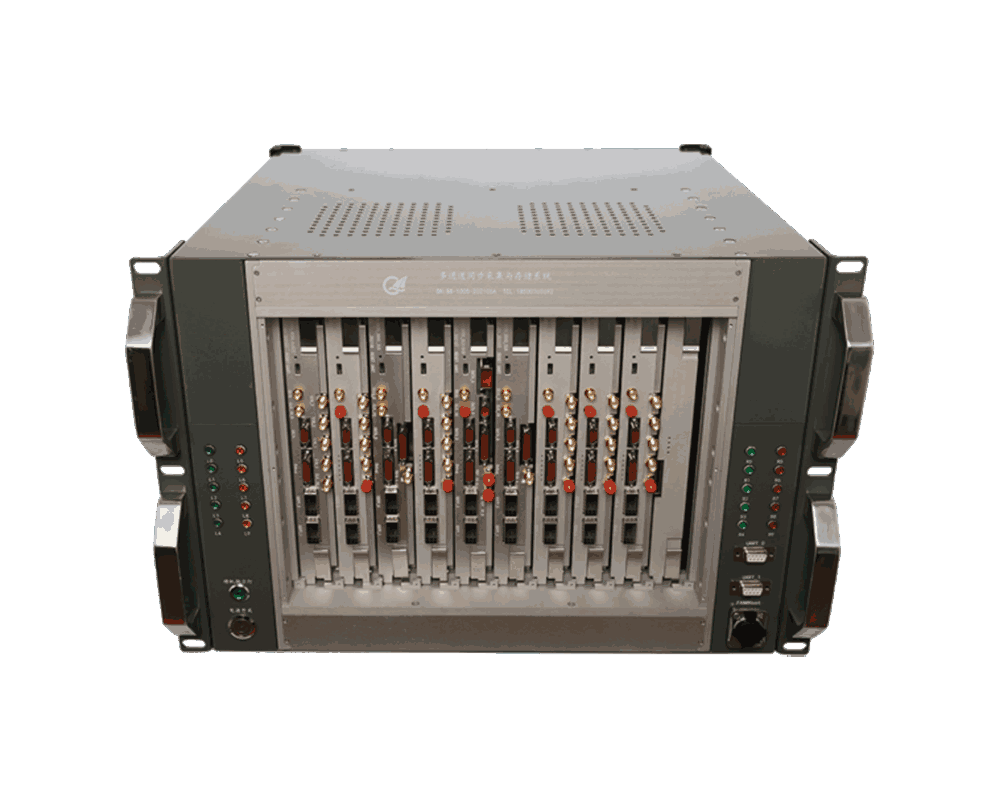
4.標(biāo)準(zhǔn)6U 14槽VPX系統(tǒng),,包括6U 14槽背板,,控制器以及機(jī)箱,控制器模塊可以通過(guò)以太網(wǎng)口將各通道的采集數(shù)據(jù)傳輸?shù)缴衔粰C(jī)進(jìn)行數(shù)據(jù)處理,。
5.同步采集校準(zhǔn)系統(tǒng),。統(tǒng)一的基準(zhǔn)時(shí)鐘和觸發(fā)信號(hào)分發(fā)。
6.上位主控計(jì)算機(jī),,通過(guò)千兆以太網(wǎng)控制各個(gè)采集系統(tǒng),,并從采集系統(tǒng)中讀取每通道的采集數(shù)據(jù)。
系統(tǒng)具有以下特點(diǎn):
1.采用標(biāo)準(zhǔn)6U VPX機(jī)箱,,整個(gè)系統(tǒng)緊湊,,符合工業(yè)級(jí)溫度工作范圍,-40C°至85C°,。
2.每個(gè)機(jī)箱可以插入12塊采集板,,每塊采集板包括8通道500MSPS,14bit采樣,和高速存儲(chǔ)系統(tǒng),;一個(gè)機(jī)箱總共支持90通道采集,。
3.每個(gè)機(jī)箱采用獨(dú)立的時(shí)鐘/觸發(fā)控制模塊,進(jìn)行時(shí)鐘和觸發(fā)信號(hào)的分發(fā),,采用星形拓?fù)浣Y(jié)構(gòu),,通過(guò)背板的高速互連線進(jìn)行等延遲的統(tǒng)一分發(fā)時(shí)鐘和觸發(fā)信號(hào)。
4.同步校正系統(tǒng)統(tǒng)一放送基準(zhǔn)時(shí)鐘和觸發(fā)信號(hào),。
5.通過(guò)自定義背板連接信號(hào),,增加了系統(tǒng)的緊湊性,大量減少了連接線,。
模塊尺寸,,標(biāo)準(zhǔn)6U 尺寸,寬度,1插槽,。

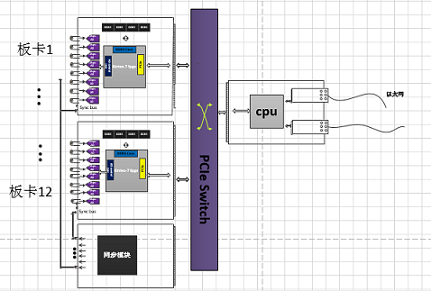
系統(tǒng)實(shí)現(xiàn)框圖如下:
數(shù)據(jù)傳輸原理圖:
2,、采集模塊介紹
每個(gè)采集系統(tǒng)有如下部分組成:
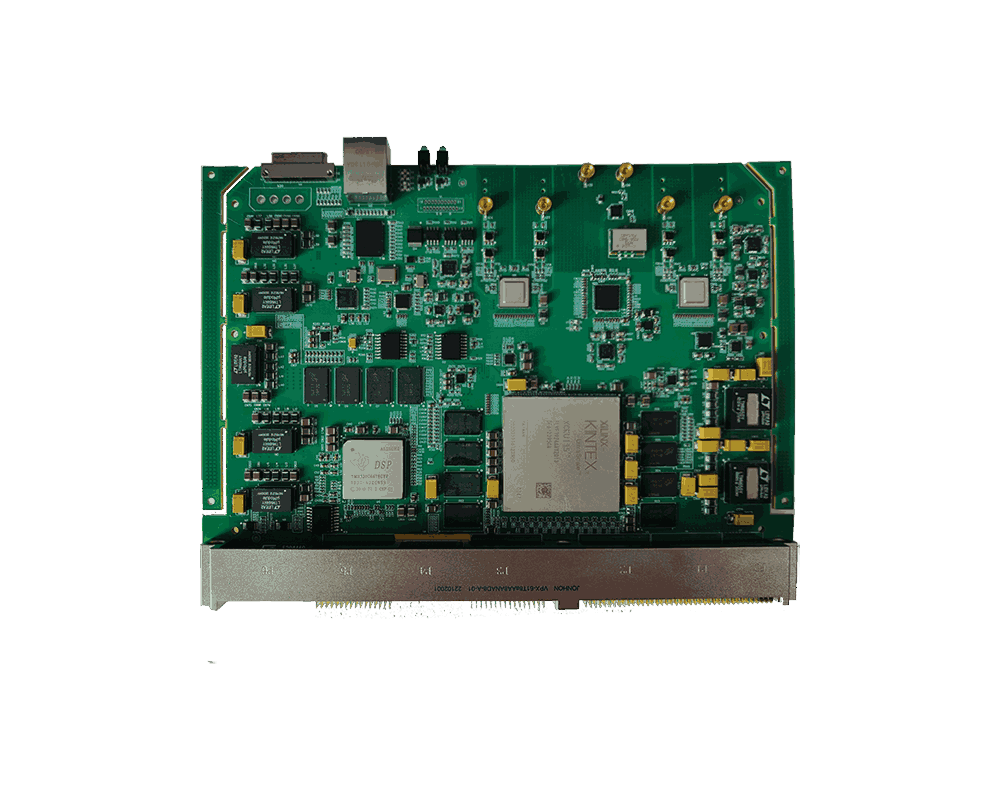
1、12塊采集模塊,,每塊采集模塊集成8通道500MSPS 14bit ADC,,每通道儲(chǔ)存空間至少為512Msamples。
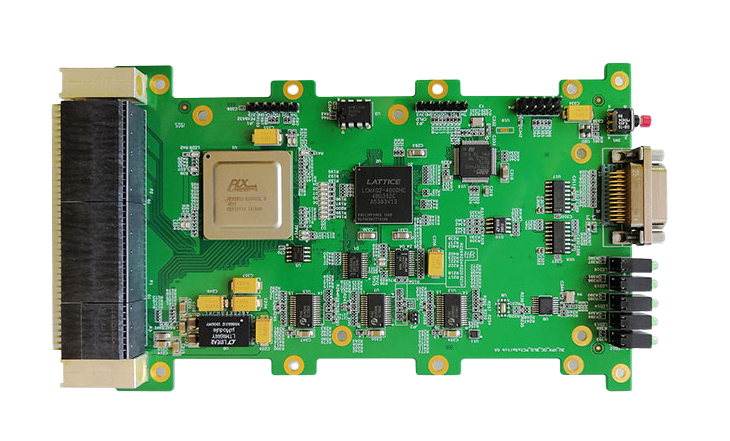
2,、1塊同步時(shí)鐘/觸發(fā)模塊,,接收系統(tǒng)基準(zhǔn)時(shí)鐘和觸發(fā)控制信號(hào),以及校準(zhǔn)信號(hào),。
3,、主控模塊,負(fù)責(zé)接收上位機(jī)的控制命令以及上傳采集數(shù)據(jù),。
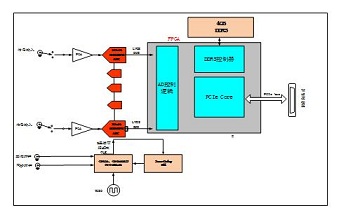
采集模塊的實(shí)現(xiàn)原理如下:
采集模塊技術(shù)指標(biāo)如下:
ADC輸出位數(shù) :14bit,,采樣率500MSPS
有效位數(shù)(ENOB)(typ.):8.1bit
模擬帶寬:300MHz
輸入阻抗:50 歐,AC/DC藕合/SMA
滿量程輸入量程:700mVpp或1Vpp
時(shí)鐘:支持板載時(shí)鐘或外時(shí)鐘
觸發(fā):支持軟件觸發(fā)或外觸發(fā)
3,、專(zhuān)用于核物理的采集功能:
采集數(shù)據(jù)并行處理邏輯:
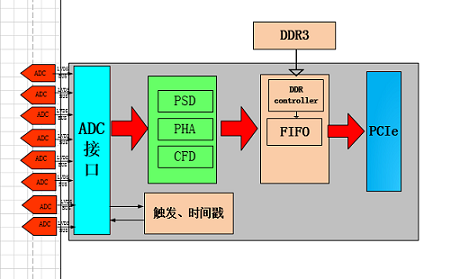
1、每個(gè)通道獨(dú)立工作,,通過(guò)脈沖電平觸發(fā),,單次采集時(shí)間可設(shè)置在1us左右。
2、支持時(shí)間戳,,峰值檢測(cè),、峰值分析,可設(shè)置為動(dòng)態(tài)采集長(zhǎng)度。
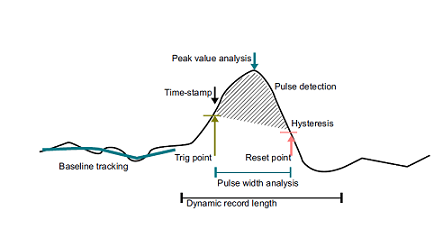
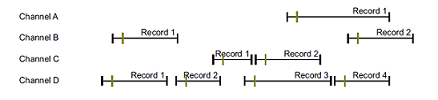
時(shí)間戳(time-stamp)功能:
時(shí)間戳選項(xiàng)將信號(hào)觸發(fā)事件開(kāi)始的時(shí)間記錄于一個(gè)額外的內(nèi)存空間,。時(shí)間戳是對(duì)應(yīng)的是每次采集開(kāi)始的時(shí)間信息,其與外部無(wú)線時(shí)鐘或GPS時(shí)鐘同步,采用這一選項(xiàng)使得采集模塊可準(zhǔn)確記錄每次采集的發(fā)生時(shí)間,,并且不同位置的采集系統(tǒng)之間存在一個(gè)精確的時(shí)間對(duì)應(yīng)關(guān)系,有利于實(shí)現(xiàn)對(duì)信號(hào)的記錄,、分析,。
3、每個(gè)通道完成三種算法:
a, 恒比定時(shí)(CFD)
恒比定時(shí)是具有恒定觸發(fā)比的時(shí)檢電路,,是為了解決過(guò)零定時(shí)中觸發(fā)比不能
調(diào)節(jié)到佳值而發(fā)展起來(lái)的一種定時(shí)方法,。
設(shè)輸入信號(hào)氣Vinput=Af (t) , A為幅度。Vth =p*A為觸發(fā)閾值,,則過(guò)閾值時(shí)時(shí)間取決于下式的解:
Af(t)一pA=0
由上式可見(jiàn),,f(t)為任意函數(shù),t的解與A無(wú)關(guān),。
恒比定時(shí)的實(shí)現(xiàn)方法如下圖所示:
b , 脈沖形狀甄別(PSD)
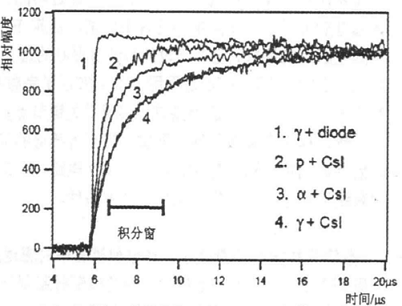
(1),,積分(CI)。
如下圖所示,,不同類(lèi)型射線作用輸出的核脈沖信號(hào)在特定窗口內(nèi)的積分面積相對(duì)于脈沖幅度有明顯差異,,這種粒子區(qū)分方法適用于低幅度脈沖信號(hào)甄別,并具有較寬的動(dòng)態(tài)范圍,。
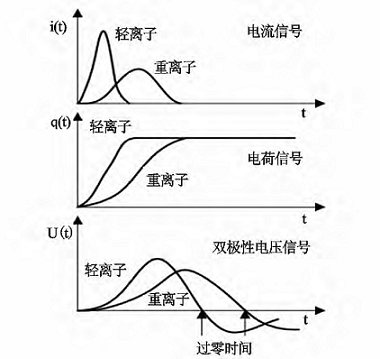
(2),,過(guò)零時(shí)間檢測(cè)(ZLEplus)。
如下圖 所示,,較重的粒子產(chǎn)生的電流脈沖持續(xù)時(shí)間較長(zhǎng),,幅值較低,電荷上升時(shí)間較長(zhǎng),,過(guò)零時(shí)間也較大,。
(3)脈沖高度分析(PHA)
脈沖高度分析是核物理中的一種常用測(cè)試方法,即利用探測(cè)器接收脈沖,,并分析計(jì)算不同粒子的脈沖高度,,并保存通達(dá)或寄存器中每個(gè)高度的脈沖數(shù)量,以助于后面的譜分析,。
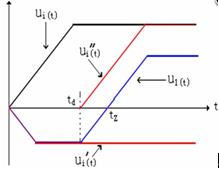
(4)微分,。
不同入射荷電粒子在探測(cè)器中輸出的脈沖信號(hào)是不同的, 其主要表現(xiàn)在脈沖前沿上。對(duì)具有一定上升時(shí)間的脈沖信號(hào)進(jìn)行雙微分, 則雙微分后的脈沖與零電平相交產(chǎn)生一個(gè)過(guò)零點(diǎn), 它只與脈沖信號(hào)前沿時(shí)間有關(guān),。通過(guò)對(duì)脈沖前沿起始點(diǎn)與過(guò)零點(diǎn)時(shí)間的測(cè)量, 則可對(duì)入射荷電粒子進(jìn)行分辨,。該方法實(shí)質(zhì)上是將探測(cè)器輸出脈沖前沿的差別轉(zhuǎn)化為脈沖起始時(shí)刻與過(guò)零點(diǎn)間時(shí)間上的差別, 并將時(shí)間差別通過(guò)TAC轉(zhuǎn)換來(lái)實(shí)現(xiàn)對(duì)入射荷電粒子的分辨,。
(5)脈沖前沿拾取。
脈沖前沿拾取方法的原理如下圖:
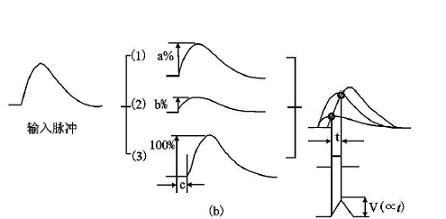
采集后輸出信號(hào)分為三路, 路衰減為a%, 第二路衰減為b%, 第三路脈沖不變并延遲一段時(shí)間τ0 , 將二三路脈沖進(jìn)行混合比較, 這兩路脈沖有一個(gè)交點(diǎn), 將該點(diǎn)作為下拾取點(diǎn), 送到混合器觸發(fā)脈沖作為觸發(fā)開(kāi)始;一三路混合比較, 脈沖交點(diǎn)作為上拾取點(diǎn), 作為觸發(fā)結(jié)束, 這樣輸出的脈寬時(shí)間也就對(duì)應(yīng)著脈沖前沿拾取份額, 份額大小由對(duì)脈沖衰減的狀態(tài)確定, 即由a%到b%之間的差值決定,。在固定的幅度范圍內(nèi), 脈沖上升快的需要時(shí)間短,、脈沖上升慢的需要時(shí)間長(zhǎng), 通過(guò)測(cè)量時(shí)間長(zhǎng)短進(jìn)行粒子分辨,所以可以根據(jù)實(shí)際需要選擇佳分辨的拾取時(shí)間。
這種方法只對(duì)探測(cè)器輸出的脈沖前沿進(jìn)行比較, 不涉及脈沖信號(hào)幅度,。而且該種拾取是自身比較的拾取, 可大大減少外來(lái)因素對(duì)探測(cè)器脈沖影響而造成的分辨變差,。
4,三種數(shù)據(jù)記錄格式可選,,以節(jié)約存儲(chǔ)空間,,提高采集效率
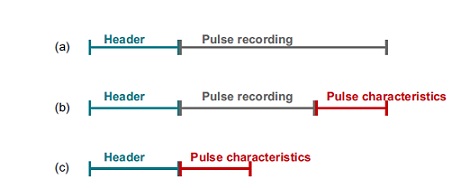
注釋?zhuān)?/span>
a,存儲(chǔ)采集數(shù)據(jù)和時(shí)間戳等
b,在存儲(chǔ)采集數(shù)據(jù)和時(shí)間戳的同時(shí),,尾部增加脈沖特征數(shù)據(jù),如峰值,、CFD,、PHA、PSD,。
c,只存儲(chǔ)時(shí)間戳和脈沖特征分析數(shù)據(jù),,如峰值、PSD,、CFD,、PHA、不存儲(chǔ)采集數(shù)據(jù)以節(jié)省空間,。
4,、多通道同步采集解決方案
首先要保證多通道的時(shí)鐘嚴(yán)格同步以及每通道的模擬電路以及每個(gè)ADC的工作狀態(tài)一致性。在輸入一個(gè)脈沖信號(hào)時(shí),,多通道系統(tǒng)有如下誤差,,如下圖所示:
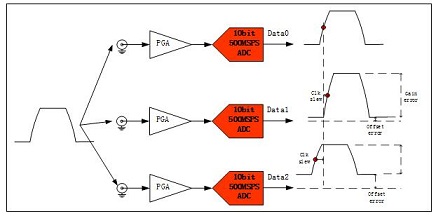
多個(gè)通道的采集誤差主要由模擬電路以及不同ADC芯片的clk slew,gain error以及offset error組成,。盡管我們?cè)谠O(shè)計(jì)硬件電路以及PCB設(shè)計(jì)會(huì)盡量考慮以上問(wèn)題,,如同源的時(shí)鐘分布以及相同的走線;多個(gè)ADC公用精準(zhǔn)的外部參考電壓源等等,,但不幸的是,,這些設(shè)計(jì)改進(jìn)并不能完全消除這些由模擬器件本身的固有特性引起的誤差,這些誤差是隨機(jī)的,,也隨溫度變化而變化的。
因此,,動(dòng)態(tài)校正電路以及自適應(yīng)的數(shù)字后補(bǔ)償算法是必不可少的解決方案,。
校正功能實(shí)現(xiàn)原理如下:
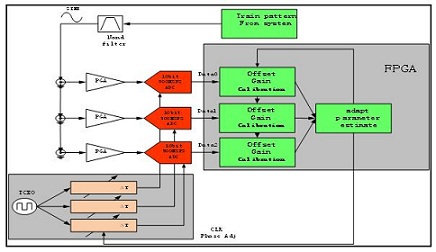
校正功能有校正電路和FPGA算法部分組成,,校正電路由高精度低速DAC,參考源,,濾波器和時(shí)鐘相位微調(diào)芯片組成,。FPGA算法核心為參數(shù)估計(jì)自適應(yīng)算法和校正參數(shù)邏輯組成。校正目標(biāo)為設(shè)置一個(gè)基準(zhǔn)通道,,其他幾個(gè)通道的時(shí)鐘相位以及gain和offset向該基準(zhǔn)通道標(biāo)定,。該方法不能校準(zhǔn)每通道ADC的絕對(duì)精度,而只是每通道的個(gè)參數(shù)一致,,這對(duì)測(cè)量每通道采集數(shù)據(jù)的相對(duì)相位是足夠了,!
校準(zhǔn)信號(hào)為A*sin(ω*t+φ)+B;
CH0采到的信號(hào)為A0*sin(ω*t+φ0)+B0;
CH1采到的信號(hào)為A1*sin(ω*t+φ1)+B1;
`
`
`
CHn采到的信號(hào)為An*sin(ω*t+φn)+Bn;
通過(guò)迭代法解線性方程組,當(dāng)方程收斂時(shí),,分別能得到每個(gè)通道的參數(shù),,通過(guò)計(jì)算每個(gè)通道的同基準(zhǔn)誤差,來(lái)調(diào)節(jié)clk phase 以及gain和offset來(lái)后是n個(gè)通道工作一致,。Clk的phase通過(guò)專(zhuān)業(yè)的時(shí)鐘調(diào)節(jié)芯片來(lái)進(jìn)行調(diào)節(jié),。
同步時(shí)鐘的傳輸和Clock jitter的消除:
雖然有自適應(yīng)校正來(lái)校正clk的傳輸相對(duì)延遲,但在電路設(shè)計(jì)時(shí)也要保證clk的小相對(duì)傳輸延遲和自身的clockjitter,。對(duì)于整個(gè)多通道采集系統(tǒng),,時(shí)鐘信號(hào)傳輸如下圖所示:
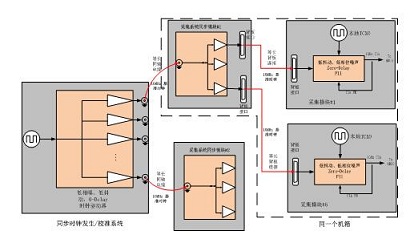
在所有傳輸過(guò)程中,均使用等長(zhǎng)的傳輸線連接,,基準(zhǔn)時(shí)鐘為10MHz,。采用低頻的基準(zhǔn)時(shí)鐘有助于減少干擾和傳輸中時(shí)鐘的jitter。在采集模塊及ADC輸入信號(hào)端,,我們采用zero delay 時(shí)鐘發(fā)生器進(jìn)行基準(zhǔn)時(shí)鐘和每個(gè)ADC采集時(shí)鐘的相位同步,,其zero delay pll如下圖所示:
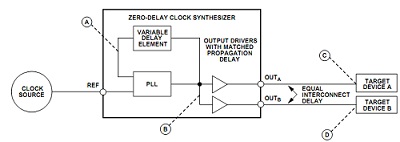
通過(guò)自動(dòng)調(diào)節(jié)芯片內(nèi)部的延遲來(lái)達(dá)到輸出時(shí)鐘和參考時(shí)鐘的相位一致性。
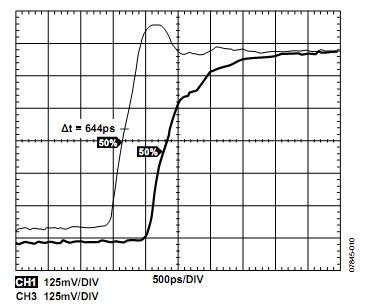
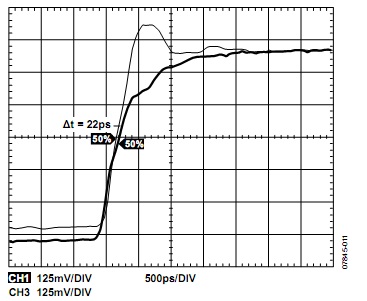
沒(méi)有進(jìn)行zero delay補(bǔ)償?shù)臅r(shí)鐘輸入/輸出相位誤差約為664ps,,這個(gè)誤差是一個(gè)范圍,,可能在0-644ps中隨機(jī)出現(xiàn)!經(jīng)過(guò) zero delay補(bǔ)償?shù)南辔徽`差如下圖:
對(duì)于clock jitter的消除:
該方案中采用超低相位噪聲的恒溫晶體以及業(yè)內(nèi)頂級(jí)的 Jitter cleaning CLK Generator芯片來(lái)保證clock的穩(wěn)定性,,Clock jitter的消除以及極低的Phase noise,。
對(duì)于時(shí)鐘芯片的選擇,也是基于同樣的考慮,,集成高精度高穩(wěn)定的VCO,,具有Jitter cleaning功能和clk phase adj功能。通常,,jitter由ADC本身的jitter和CLK jitter組成,,各自的RMS再組成總jitter的RMS:

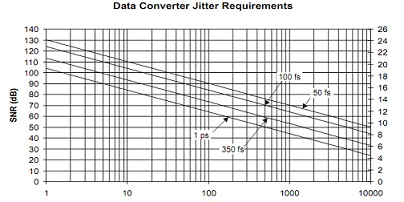
總jitter的RMS會(huì)在采集系統(tǒng)中產(chǎn)生白噪聲,其關(guān)系如下:
采集系統(tǒng)的總 
采用本時(shí)鐘解決方案,,其總的clock jitter在系統(tǒng)中完全能做到<350ps< span="">,。在忽略信號(hào)noise ,,DNL等情況下,fin和clock jitter有如下關(guān)系:
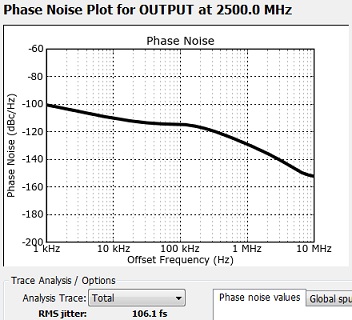
小型化的恒溫晶體加超低相位噪聲時(shí)鐘發(fā)生器,,實(shí)現(xiàn)2.5G時(shí)鐘輸出時(shí)的抖動(dòng)約100fs:
5,、系統(tǒng)電源干擾的解決方案
1.電源抑制(PSR)是采集系統(tǒng)的比較重要的指標(biāo),高的PSR能擬制電源上的CML共模噪聲,,該方案中選用的ADC具有80dB以上的電源擬制比,。
2. 有效的數(shù)字-模擬電源隔離和濾波電路。本方案中采用PICOR的專(zhuān)業(yè)有源EMI濾波器,,能在電源上產(chǎn)生65dB的共模制比和80dB的差模擬制比,,遠(yuǎn)遠(yuǎn)高于通用的磁珠等EMI濾波效果。
3.合理的PCB布線和接地

輸入保護(hù)電路:
由于輸入端口可能有很大的高電壓沖擊需要對(duì)輸入端口進(jìn)行限幅設(shè)計(jì),,并且限幅度后,,能量能快速泄放掉,及輸入端口的電路沒(méi)有殘余的電荷存在,,以至于影響正常的數(shù)據(jù)采集,。
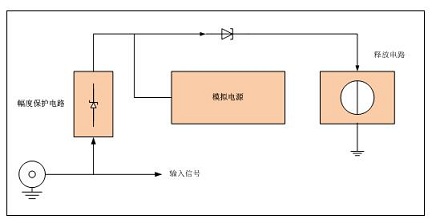
該電路以下幾部分組成:
1.幅度保護(hù)電路(含瞬態(tài)保護(hù)二極管)。
2.隧道電路,,由于許多模擬電源輸出端只能輸出電流,,不能輸入電流(灌電流),所以需要快速的隧道電路建立快速的灌電流通路,。
3.釋放電路,,通過(guò)開(kāi)啟近似理想的電源,迅速釋放電流到地,。
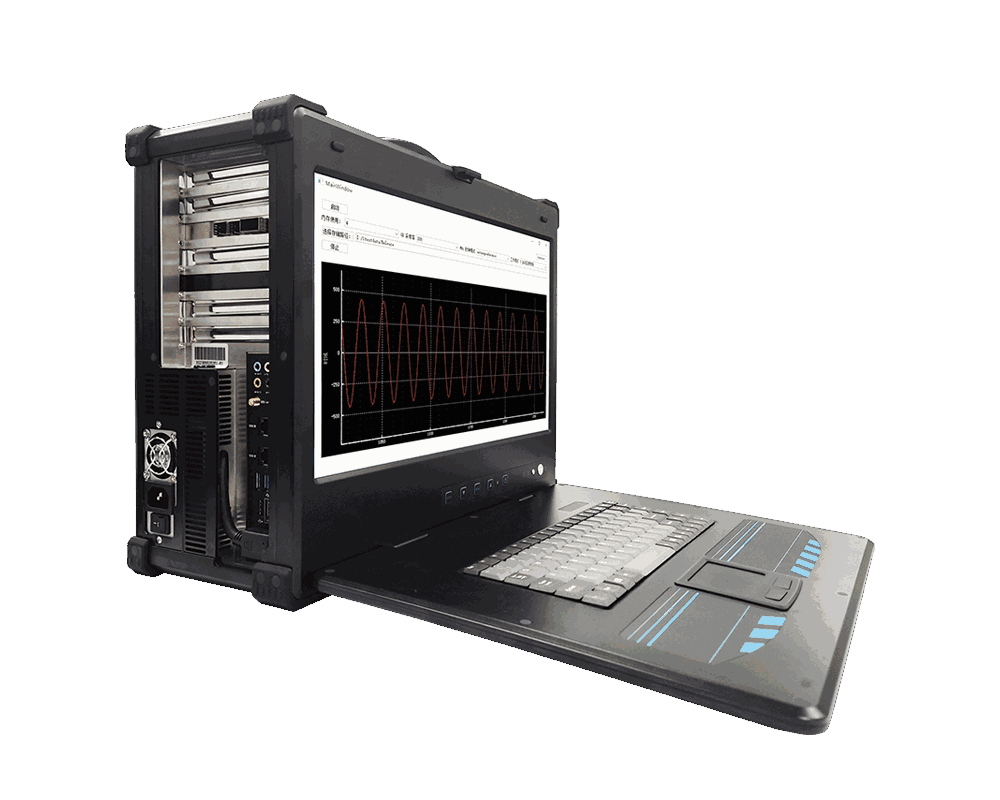
6,、系統(tǒng)配套軟件
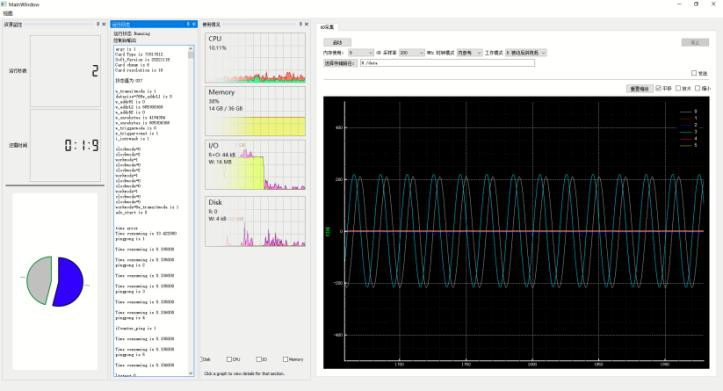
系統(tǒng)軟件包括應(yīng)用軟件,二次開(kāi)發(fā)API函數(shù),。應(yīng)用軟件,,具有虛擬示波器功能,方便設(shè)置硬件,,讀取/保存數(shù)據(jù)以及波形顯示/頻譜分析功能,。
1、其功能和界面如下所示:
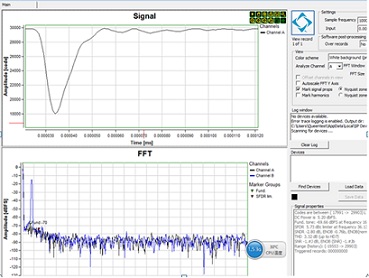
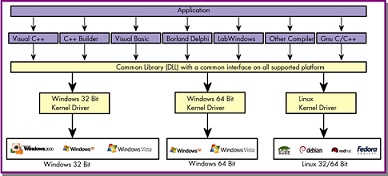
2,、二次開(kāi)發(fā)API函數(shù):
我們提供豐富的接口函數(shù)和系統(tǒng)主要功能的例程,,支持C/C++,labview以及Matlab環(huán)境下的二次程序開(kāi)發(fā),。






















頁(yè)廣告7")