序控制")
雙腔氣體激光放電同步控制系統(tǒng)
1,、概述
雙腔氣體激光放電同步控制系統(tǒng)主要根據(jù)中國(guó)科學(xué)院光電研究院設(shè)計(jì)任務(wù)進(jìn)行研制,,該系統(tǒng)提供兩路可調(diào)延遲的脈沖輸出信號(hào),并且能夠?qū)Ψ答伒膬陕访}沖信號(hào)進(jìn)行時(shí)間間隔的準(zhǔn)確測(cè)量,以便調(diào)節(jié)輸出脈沖信號(hào)的延遲時(shí)間,,從而得到用于雙腔放電的兩路可調(diào)延時(shí)低抖動(dòng)脈沖觸發(fā)信號(hào)。
系統(tǒng)指標(biāo):
重復(fù)頻率:1——4KHz
抖動(dòng)控制精度:±5ns
延時(shí)控制范圍:20ns——1μs
延時(shí)分辨率:3ns
2,、系統(tǒng)組成
雙腔氣體激光放電同步控制系統(tǒng)主要由上位機(jī),、高速數(shù)據(jù)采集卡、脈沖信號(hào)發(fā)生器,、脈沖信號(hào)延遲器,、脈沖信號(hào)整形器等組成,組成框圖如圖1所示,,其中P1和P2為兩路輸出脈沖信號(hào),,PF1和PF2為兩路反饋信號(hào)。
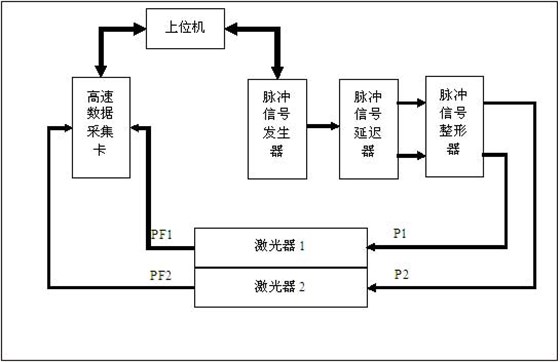
圖1 雙腔氣體激光放電同步控制系統(tǒng)組成框圖
3,、工作原理
雙腔氣體激光放電同步控制系統(tǒng)的簡(jiǎn)要工作原理如下,。如圖1所示,首先通過(guò)上位機(jī)設(shè)置輸出脈沖信號(hào)的頻率與時(shí)間延遲,、輸入脈沖的時(shí)間間隔,,然后通過(guò)脈沖信號(hào)發(fā)生器產(chǎn)生兩路脈沖信號(hào),由脈沖信號(hào)延遲器對(duì)兩路信號(hào)進(jìn)行時(shí)間延遲,,后通過(guò)脈沖信號(hào)整形器完成輸出脈沖信號(hào)的上升沿整形以及阻抗匹配,,后兩路脈沖信號(hào)P1和P2分別輸入到指定的激光器系統(tǒng);兩路反饋信號(hào)PF1和PF2通過(guò)高速數(shù)據(jù)采集卡和上位機(jī)完成兩路反饋信號(hào)的采集與延遲時(shí)間計(jì)算,,如果采集到的延遲時(shí)間與設(shè)定時(shí)間不一致,,則調(diào)節(jié)兩路輸出脈沖的延遲時(shí)間,直到兩路反饋信號(hào)的延遲時(shí)間與設(shè)定時(shí)間一致時(shí)停止,。下面對(duì)各部分工作原理進(jìn)行詳細(xì)介紹,。
3.1上位機(jī)
上位機(jī)主要由計(jì)算機(jī)和相應(yīng)軟件組成,用來(lái)控制高速數(shù)據(jù)采集卡和脈沖信號(hào)發(fā)生器,。
3.2脈沖信號(hào)發(fā)生器
脈沖信號(hào)發(fā)生器主要由單片機(jī),、FPGA、DDS等組成,主要完成兩路脈沖信號(hào)的產(chǎn)生,、脈沖寬度以及頻率的設(shè)置,。
3.3脈沖信號(hào)延遲器
3.3.1模擬與數(shù)字相結(jié)合
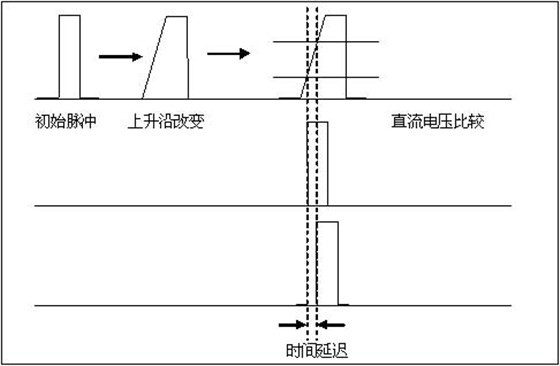
圖2 模擬與數(shù)字相結(jié)合脈沖信號(hào)延遲器原理圖
脈沖信號(hào)延遲器可以采用模擬與數(shù)字相結(jié)合的方法,如圖2所示,,首先脈沖信號(hào)經(jīng)過(guò)上升沿延遲電路,,使脈沖的上升沿斜率改變,然后由直流電壓和脈沖進(jìn)行比較得到延遲的兩路輸出脈沖,。采用該方法控制脈沖延遲精度高,、可擴(kuò)展性強(qiáng),但是電路結(jié)構(gòu)復(fù)雜,。
3.3.2純數(shù)字方式
純數(shù)字方式脈沖信號(hào)延遲器如圖3所示,,工作原理如下:脈沖信號(hào)發(fā)生器輸出兩路脈沖信號(hào),分別進(jìn)入兩路延遲芯片,,通過(guò)單片機(jī)對(duì)兩路延遲芯片分別進(jìn)行控制,,脈沖信號(hào)發(fā)生器輸出的兩路脈沖信號(hào)的時(shí)間間隔可以設(shè)定為100ns的整數(shù)倍,精度為1ns,,延遲芯片的延遲范圍為0~100ns,,精度為1ns,步進(jìn)為1ns,,這樣就可以實(shí)現(xiàn)0~1μs的準(zhǔn)確時(shí)間延遲,。
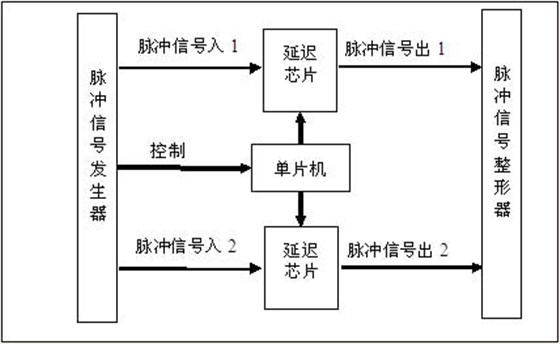
圖3 純數(shù)字方式脈沖信號(hào)延遲器原理圖
3.4脈沖信號(hào)整形器
脈沖信號(hào)整形器主要由濾波器和上升沿加速器組成,用來(lái)完成輸出阻抗的匹配以及脈沖信號(hào)上升沿的加速,。
3.5高速數(shù)據(jù)采集卡
高速數(shù)據(jù)采集卡主要完成反饋信號(hào)的采集,。本設(shè)計(jì)所用采集卡采樣率為1Gsa/S,等效采集速率為4Gsa/S,以滿足2ns分辨率的要求,。
3.6控制算法
3.7上位機(jī)界面
4,、難點(diǎn)及解決方案
4.1上位機(jī)與高速數(shù)據(jù)采集卡和脈沖信號(hào)發(fā)生器的控制
上位機(jī)通過(guò)軟件對(duì)高速數(shù)據(jù)采集卡和脈沖信號(hào)發(fā)生器進(jìn)行控制,這里面除了C語(yǔ)言的技術(shù)外還需要對(duì)Windows的底層具有深刻的理解,,能夠?qū)煞N設(shè)備進(jìn)行穩(wěn)定,、可靠的控制具有一定難度,另外輸入信號(hào)目前不能確定,,并且信號(hào)的抖動(dòng)性,、上升沿、辨別方式均不能確定,,所以和系統(tǒng)聯(lián)調(diào)時(shí)比較復(fù)雜,。我公司從2004年開(kāi)始使用上位機(jī)對(duì)高速數(shù)據(jù)采集卡以及信號(hào)發(fā)生器進(jìn)行控制研究,目前能夠穩(wěn)定可靠的控制NI,、固緯,、普源等公司生產(chǎn)的采集卡,,產(chǎn)品能夠滿足工業(yè)場(chǎng)合使用。
4.2脈沖信號(hào)延遲器分辨率與抖動(dòng)
由于脈沖信號(hào)延遲器的分辨率為3ns,,對(duì)電路所用元器件以及制板布線提出很高要求,,否則輸出脈沖信號(hào)會(huì)發(fā)生抖動(dòng)。脈沖信號(hào)延遲器主要仿制泰克公司的AFG3000系列信號(hào)發(fā)生器,,電路成熟,,設(shè)計(jì)人員經(jīng)驗(yàn)豐富,能夠設(shè)計(jì)出滿足要求的延遲器,。
5脈沖延遲時(shí)序控制系統(tǒng)試驗(yàn)
5.1兩路脈沖信號(hào)延遲試驗(yàn)
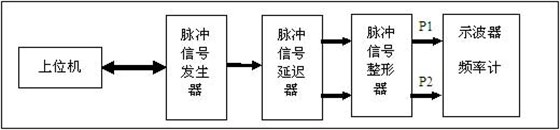
圖4 脈沖信號(hào)延遲試驗(yàn)原理圖
兩路脈沖信號(hào)延遲試驗(yàn)原理如圖4所示,,通過(guò)上位機(jī)設(shè)置兩路輸出脈沖信號(hào)的頻率、脈寬,、延遲時(shí)間,,由示波器和頻率計(jì)對(duì)輸出脈沖信號(hào)進(jìn)行測(cè)試,主要測(cè)試指標(biāo)為延遲精度,、上升沿時(shí)間,、頻率準(zhǔn)確度,、波形抖動(dòng)等,。
5.2兩路高速數(shù)據(jù)采集試驗(yàn)
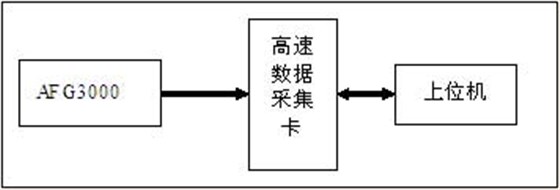
圖5 兩路高速數(shù)據(jù)采集試驗(yàn)原理圖
兩路高速數(shù)據(jù)采集試驗(yàn)原理如圖5所示,由信號(hào)源AFG3000輸出兩路延遲可調(diào)脈沖信號(hào),,通過(guò)采集卡由上位機(jī)進(jìn)行數(shù)據(jù)讀取與延遲時(shí)間計(jì)算,,以測(cè)試高速數(shù)據(jù)采集卡與上位機(jī)的采集精度與穩(wěn)定度。
5.3采集,、輸出聯(lián)調(diào)試驗(yàn)
采集,、輸出聯(lián)調(diào)試驗(yàn)原理如圖6所示,當(dāng)上位機(jī)設(shè)置的脈沖延遲時(shí)間與采集時(shí)間一致時(shí),,輸出脈沖信號(hào)的延遲時(shí)間保持不變,;不一致時(shí),輸出脈沖信號(hào)的延遲時(shí)間根據(jù)設(shè)置要求進(jìn)行改變,,該試驗(yàn)主要測(cè)試整套系統(tǒng)的工作協(xié)調(diào)性以及準(zhǔn)確性,。
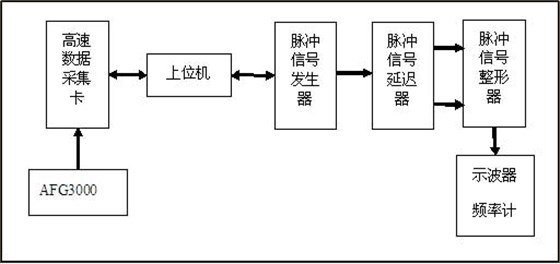
圖6 采集,、輸出聯(lián)調(diào)試驗(yàn)原理圖
5.4與激光系統(tǒng)聯(lián)調(diào)
5.4.1開(kāi)環(huán)調(diào)試
檢測(cè)系統(tǒng)加上放電腔負(fù)載后的開(kāi)環(huán)傳輸特性,。
5.4.2閉環(huán)調(diào)試
當(dāng)開(kāi)環(huán)調(diào)試試驗(yàn)均完成并且滿足要求時(shí)進(jìn)行系統(tǒng)聯(lián)調(diào),如圖1所示,。進(jìn)行閉環(huán)調(diào)試,,確定控制算法的佳參數(shù),終達(dá)到系統(tǒng)高重頻,、低抖動(dòng)特性,。
6,、結(jié)論
雙腔氣體激光放電同步控制系統(tǒng)設(shè)計(jì)方案可行,試驗(yàn)論證充分,,可按此方案進(jìn)行研制,。
該系統(tǒng)與激光系統(tǒng)聯(lián)調(diào)時(shí)比較復(fù)雜,工作量大,,可能需要反復(fù)的修改調(diào)節(jié)方案,。
7、研發(fā)計(jì)劃
詳細(xì)研發(fā)計(jì)劃如下:
8,、經(jīng)費(fèi)預(yù)算
 電話咨詢
電話咨詢 產(chǎn)品中心
產(chǎn)品中心 在線留言
在線留言 關(guān)于坤馳
關(guān)于坤馳