1.測(cè)污激光雷達(dá)的原理
激光雷達(dá)的一個(gè)重要應(yīng)用領(lǐng)域是大氣探測(cè),,大氣探測(cè)是利用各種探測(cè)手段對(duì)大氣中的物理過(guò)程和物理現(xiàn)象及氣象要素等進(jìn)行觀測(cè),、探測(cè)并使用不同的載體記錄下來(lái),。大氣探測(cè)所獲取的氣象記錄、資料是進(jìn)行天氣預(yù)報(bào),、氣候分析,、氣象科學(xué)研究和為各行各業(yè)服務(wù)的基礎(chǔ)。
隨著我國(guó)工業(yè)經(jīng)濟(jì)的發(fā)展,,大氣污染也日益加重,。保護(hù)我們的生存環(huán)境,保護(hù)人類賴以生存的大氣層,,已經(jīng)是迫不及待的事情了,。發(fā)展一種快速檢測(cè)大氣中污染氣體的手段,已成為激光雷達(dá)研究中的重要的課題,,因?yàn)樗P(guān)系到我國(guó)社會(huì)能否持續(xù)發(fā)展的重大問(wèn)題,。
激光雷達(dá)是一種主動(dòng)式的現(xiàn)代光學(xué)遙感設(shè)備,其基本工作原理與普通雷達(dá)類似:由發(fā)射系統(tǒng)發(fā)送一個(gè)信號(hào)與目標(biāo)物質(zhì)作用,,返回的帶有目標(biāo)物質(zhì)信息的信號(hào)被接收系統(tǒng)收集并進(jìn)行處理以獲得需要的信息,。所不同的是激光雷達(dá)的發(fā)射信號(hào)是激光,它是傳統(tǒng)無(wú)線電波雷達(dá)在光學(xué)頻段上的延伸,?;诩す獾母鞣N特性,激光雷達(dá)具有很高的時(shí)空分辨率和探測(cè)靈敏度,,在大氣探測(cè)和研究方面有著廣闊的應(yīng)用前景,。
2.激光雷達(dá)中的AD采集卡
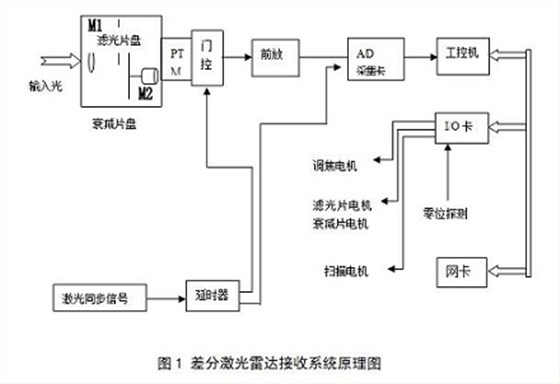
光電倍增管輸出的模擬電流信號(hào)必須轉(zhuǎn)換為電壓,經(jīng)放大,、數(shù)字化后才能提供給計(jì)算機(jī)做數(shù)據(jù)處理,,終得到污染物的濃度分布。因此數(shù)字化是很重要的一個(gè)環(huán)節(jié),。圖1是差分激光雷達(dá)接收系統(tǒng)的原理圖,,圖上只列出了主要部件。下面我們重點(diǎn)介紹一下對(duì)數(shù)據(jù)采集卡的要求,。激光雷達(dá)通常以20HZ的頻率發(fā)射激光脈沖,,要求AD采集卡以10MHZ的速度與發(fā)射同步地連續(xù)采集1000點(diǎn)的回波信號(hào)。對(duì)應(yīng)的探測(cè)距離是15公里,,距離分辨率是15m,。由于激光雷達(dá)是脈沖式工作,數(shù)據(jù)流量并非很大,。連續(xù)測(cè)量的時(shí)間每次大約是100秒到1000秒,,并因測(cè)量目的而異。為了能夠?qū)崟r(shí)顯示,,通常把每個(gè)脈沖的數(shù)據(jù)都保存和顯示,,因而不要求很大的板上存儲(chǔ)空間。
另一個(gè)重要的指標(biāo)是AD轉(zhuǎn)換分辨率,,8bit分辨率對(duì)應(yīng)于滿量程0.3%的精度,,12bit分辨率對(duì)應(yīng)0.025%的精度。由于激光雷達(dá)回波信號(hào)變化范圍很大(動(dòng)態(tài)范圍大),,我們又要求有很高的測(cè)量精度,,特別是想得到污染物空間分布圖時(shí),因此我們希望采用12bit以上的高分辨率的采集卡,??傊す饫走_(dá)對(duì)AD采集卡的主要要求有:10MHz以上的采集速度,,12bit以上的AD分辨率,,50歐姆輸入阻抗,較高的靈敏度和足夠的通帶寬,,外觸發(fā)采集功能,,對(duì)外部干擾隔離好,支持多種語(yǔ)言的驅(qū)動(dòng)軟件等,。而坤馳科技的QT1130高速數(shù)據(jù)采集卡在技術(shù)上是完全符合要求的,。
系統(tǒng)上使用的QT1130采集卡的技術(shù)指標(biāo)如下:
- 大支持四通道同步采集
- 高1GSPS 采樣率
- 12bit 轉(zhuǎn)換精度
- 高2GHz 模擬輸入帶寬
- 大板載4GB DDR3 存儲(chǔ)器
- 支持外部觸發(fā)輸入或輸出
- PCIe x8 Gen2 接口,數(shù)據(jù)連續(xù)傳輸率3.0GB/s
- FPGA 支持用戶自定義邏輯開發(fā)

3.數(shù)據(jù)處理軟件設(shè)計(jì)
如果采用實(shí)時(shí)處理模式,,新產(chǎn)生的數(shù)據(jù)被實(shí)時(shí)處理模塊捕獲,,實(shí)時(shí)處理模塊對(duì)數(shù)據(jù)的合法性進(jìn)行檢查同時(shí)判斷出數(shù)據(jù)的類型然后傳遞到數(shù)據(jù)處理算法,。數(shù)據(jù)處理算法模塊根據(jù)數(shù)據(jù)的類型調(diào)用合適的算法進(jìn)行計(jì)算,一方面把結(jié)果存入文本文件,,另一方面根據(jù)顯示模式的不同把結(jié)果傳遞到不同的圖像繪制模塊,。在一般測(cè)量情況下將數(shù)據(jù)傳遞到曲線繪制模塊,車載激光雷達(dá)進(jìn)行被測(cè)物質(zhì)時(shí)間分布測(cè)量時(shí)將數(shù)據(jù)傳遞到時(shí)間演化圖繪制模塊,,如果車載激光雷達(dá)進(jìn)行被測(cè)物質(zhì)空間分布測(cè)量時(shí)將數(shù)據(jù)傳遞到剖面圖繪制模塊,。各圖像繪制模塊完成結(jié)果的顯示后將圖像保存為圖片文件以備以后查閱。
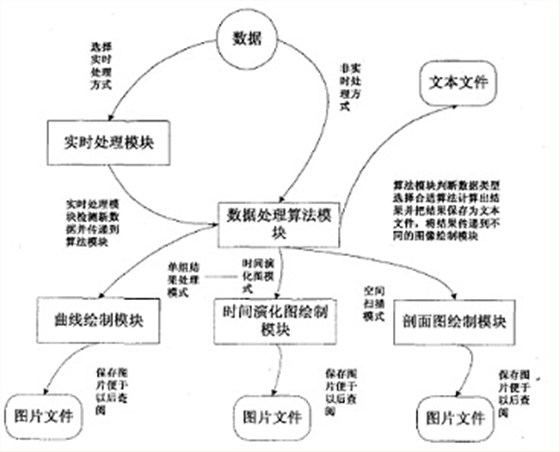
圖3 軟件模塊與數(shù)據(jù)流
4.AD采集卡的抗干擾問(wèn)題
高速數(shù)據(jù)采集卡可能引進(jìn)噪音,,主要包括來(lái)自周圍電子器件的隨機(jī)干擾,、與激光器發(fā)射相關(guān)的電磁干擾和本底基線偏移。本底基線指激光雷達(dá)系統(tǒng)的暗背景測(cè)量基線,,理想情形它是一條水平直線,。可是在實(shí)際系統(tǒng)中經(jīng)常觀察到起點(diǎn)偏移,,我們稱本底基線偏移,。這種偏移很小,但是它不穩(wěn)定,,它與真實(shí)的信號(hào)重疊在一起成為測(cè)量誤差,。為了能探測(cè)到污染分子的存在,必須大的提高系統(tǒng)靈敏度,,通常要把激光測(cè)量重復(fù)幾千次甚至幾萬(wàn)次以提高信噪比,。同時(shí)必須盡量的減小各種干擾,包括這種基線偏移,。
實(shí)驗(yàn)證明,,減小外觸發(fā)信號(hào)可以減小本底基線偏移;說(shuō)明基線偏移的一個(gè)重要來(lái)源是外觸發(fā)電壓,。其產(chǎn)生的原因可能是板卡設(shè)計(jì)上的缺陷,,外觸發(fā)信號(hào)的一部分經(jīng)過(guò)分布電容耦合到了信號(hào)輸入端?;€偏移的另一個(gè)重要來(lái)源是激光高壓放電脈沖干擾,,它很不穩(wěn)定,與接線情況,,地線好壞,,板卡設(shè)計(jì),溫度濕度等都有關(guān)系,。
5.結(jié)論
經(jīng)過(guò)實(shí)踐證實(shí),,可以說(shuō)坤馳科技的QT1130高速數(shù)據(jù)采集卡應(yīng)用于測(cè)污激光雷達(dá)具有高的性能價(jià)格比。在一些特殊應(yīng)用上,還能夠提高測(cè)污激光雷達(dá)的性能,,實(shí)現(xiàn)了高分辨率的采集功能,。

 電話咨詢
電話咨詢 產(chǎn)品中心
產(chǎn)品中心 在線留言
在線留言 關(guān)于坤馳
關(guān)于坤馳